| Function block | MC_MoveCircularAbsolute | ||
|---|---|---|---|
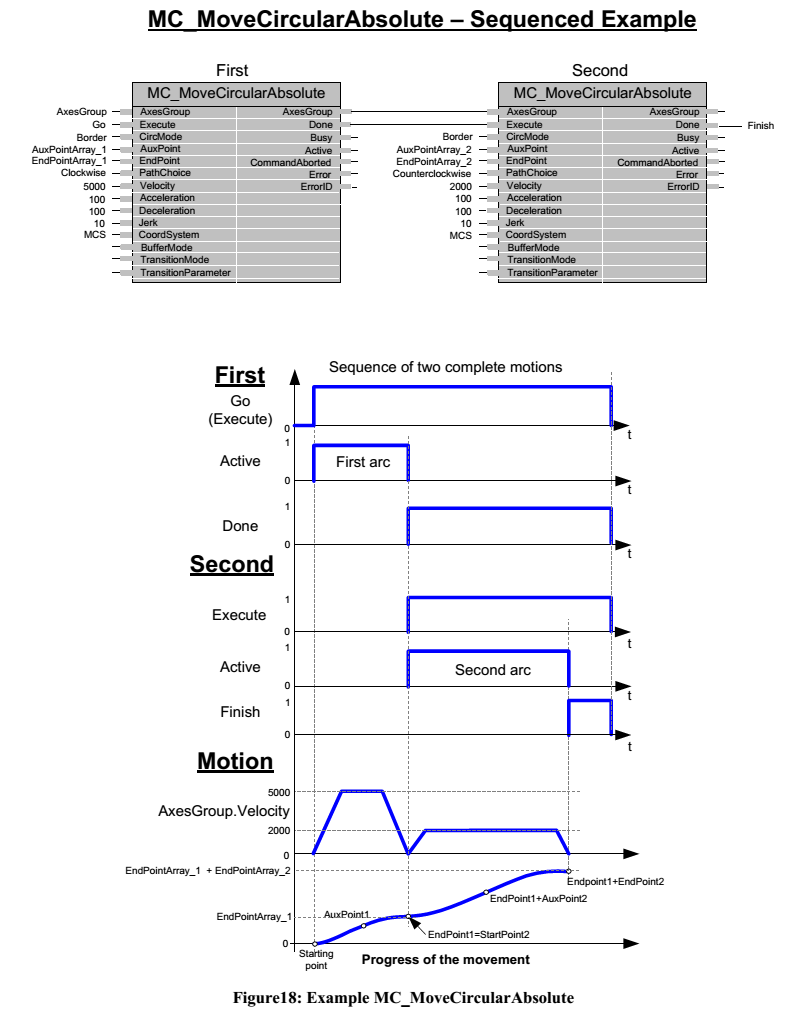
| Commands an interpolated circular movement on an axis group from the current position of the tool center point. The end point and the auxiliary point (the meaning of both points depends on the CircMode mode you select) are defined absolutely in the specified coordinate system. | |||
| VAR_IN_OUT | |||
| B | GroupIn | AXES_GROUP_REF | Reference to a group of axes. References are zero based. You can have up to 32 groups. |
| VAR_INPUT | |||
| B | Execute | BOOL | Starts the motion at rising edge. |
| V | ContinuousUpdate | BOOL |
If TRUE, when the function block (FB) is running and the values of the parameters are updated, the FB will use the new value. If FALSE, the FB won't use the new value. NOTE: This parameter is not supported. |
| B | CircMode | MC_CircMode | Specifies the meaning of the input signal AuxPoint. |
| B | AuxPoint | ARRAY [0..63] OF LREAL | Array [0..63] of absolute positions for each dimension in the specified coordinate system. |
| B | EndPoint | ARRAY [0..63] OF LREAL | Array [0..63] of absolute positions for each dimension in the specified coordinate system. |
| E | PathChoice | MC_CircPathChoice | Choice of path. |
| E | Velocity | LREAL | Maximum velocity of the path for the coordinate system in which the path is defined. Always positive. Not necessarily reached. [unit/second] |
| E | Acceleration | LREAL | Maximum acceleration. Always positive. Not necessarily reached. The unit is determined by MC_ProfileType. [unit/second2] or [second] |
| E | Deceleration | LREAL | Maximum deceleration. Always positive. Not necessarily reached. The unit is determined by MC_ProfileType. [unit/second2] or [second] |
| E | Jerk | LREAL | Maximum jerk. Always positive. Not necessarily reached. The unit is determined by MC_ProfileType. [unit/second3] or [second] |
| E | CoordSystem | MC_CoordSystem | A coordinate system. |
| E | BufferMode | MC_BufferMode | Defines how to blend the velocity of two function blocks. |
| E | TransitionMode | MC_TransitionMode | Currently it inserts no transition curve. |
| E | TransitionParameter | ARRAY [0..63] OF LREAL | Additional parameter for the transition mode. If TransitionMode is set to mcNone, this parameter has no effect. |
| VAR_OUTPUT | |||
| B | Done | BOOL | Commanded end positions reached for all axes. |
| E | Busy | BOOL | The function block is not finished. |
| E | Active | BOOL | The function block has control on the axis group. |
| E | CommandAborted | BOOL | The command is aborted by another command. |
| B | Error | BOOL | Signals that an error has occurred within the function block. |
| E | ErrorID | MC_Error | Error identification. |
|
|||
| MC_MoveCircularAbsolute | ||||||
|---|---|---|---|---|---|---|
| AXES_GROUP_REF | GroupIn | Group | AXES_GROUP_REF | |||
| BOOL | Execute | Done | BOOL | |||
| BOOL | ContinuousUpdate | Busy | BOOL | |||
| MC_CircMode | CircMode | Active | BOOL | |||
| ARRAY [0..63] OF LREAL | AuxPoint | CommandAborted | BOOL | |||
| ARRAY [0..63] OF LREAL | EndPoint | Error | BOOL | |||
| MC_CircPathChoice | PathChoice | ErrorID | MC_Error | |||
| LREAL | Velocity | |||||
| LREAL | Acceleration | |||||
| LREAL | Deceleration | |||||
| LREAL | Jerk | |||||
| MC_CoordSystem | CoordSystem | |||||
| MC_BufferMode | BufferMode | |||||
| MC_TransitionMode | TransitionMode | |||||
| ARRAY [0..63] OF LREAL | TransitionParameter | |||||